Ducted fans on its toes help this robot to balance while taking giant steps

As you may have noticed, bipedal robots have a tendency to fall over. This often happens when the robots are trying to take a step, because stepping involves balancing on one foot while moving. All steps aren’t equal, of course—you’ve got easy steps, when you’re walking slowly across a flat surface, and you’ve got hard steps, when you’re trying to avoid an obstacle by stepping over it or across it. Both robots and humans are constrained in the kinds of steps we’re able to take by (among other things) how far we can stick a leg out without falling over. Humans mitigate this to some extent by dynamic walking, also known as constantly falling forward, but for less dynamic (quasi-static) robots, step length puts a significant limitation on the kinds of obstacles they can deal with.
The fundamental problem here is that the longer the step you want to take, the more your center of gravity moves out toward the leg you’re taking the step with. Try to take too big of a step, and you’ll fall forwards while extending your leg. Go on, try it!*
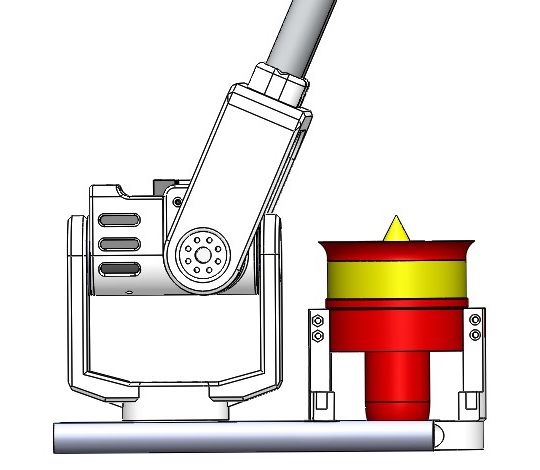
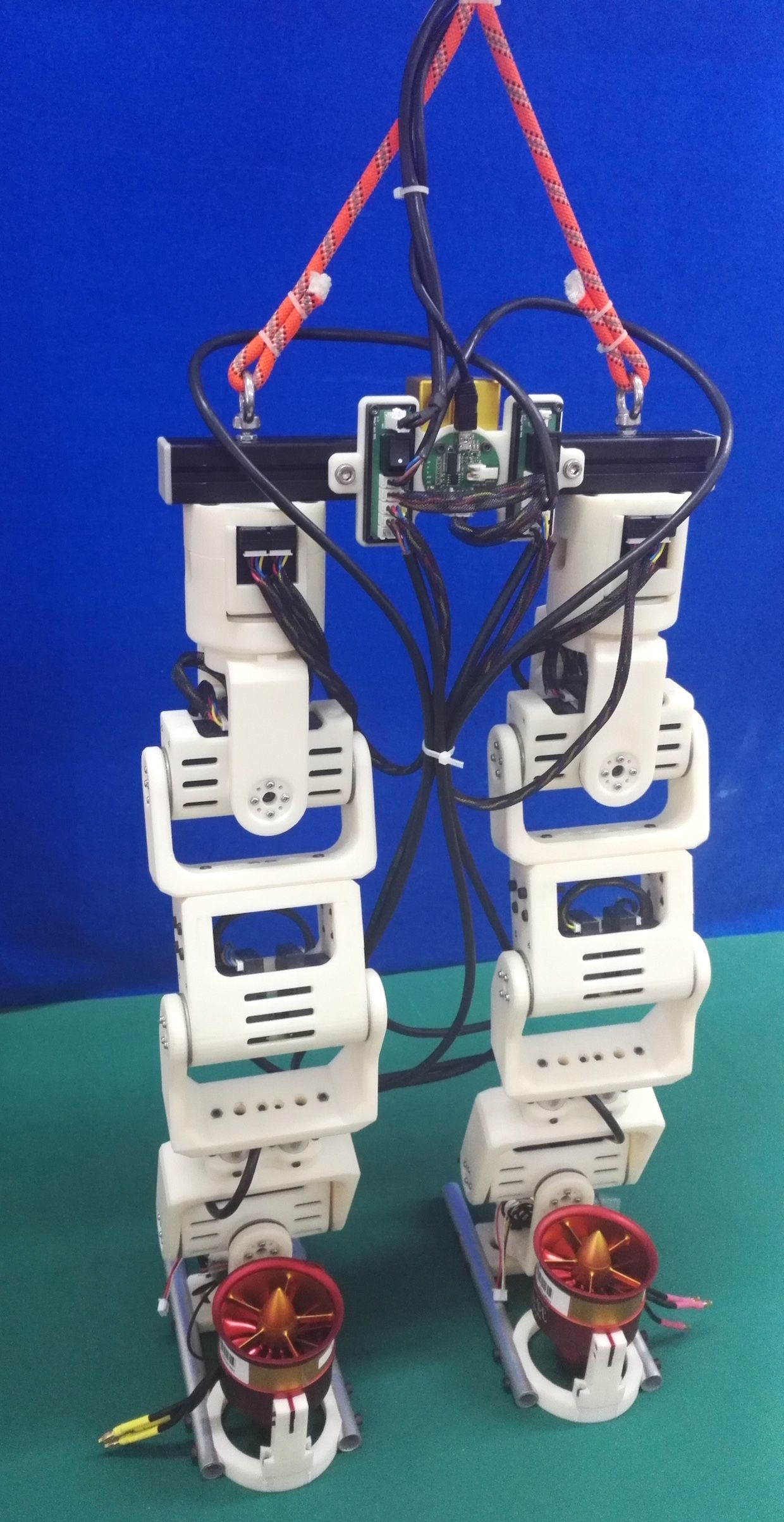
Solving this for a quasi-static robot (or human) can be done by changing the center of gravity somehow, either by reducing the weight of the leg you’re sticking out, or increasing the weight of all of the rest of you. At Guangdong University of Technology’s School of Automation in China roboticists are experimenting with using small ducted fans embedded in the feet of a bipedal robot. The idea is to change the robot’s center of gravity to help it balance as it takes giant steps over a wide gap that it normally wouldn’t be able to cross.
The robot, called Jet-HR1, weighs 6.5 kilograms and has a height of 65 centimeters. On the end of each foot is a ducted fan jet engine, which weighs just 232 grams but can output up to 2 kg of thrust, nearly a third of the weight of the entire robot.
In one experiment, Jet-HR1 was tasked with stepping over a gaping chasm 37 cm wide, which required a step length of 80 percent of its leg. To make this work, the robot spooled up the ducted fan as it stuck its leg out, essentially holding the leg up and preventing the robot from tipping forwards. Once the robot has its jet foot planted on the far side of the gap, it repeats the procedure with its back leg to complete the crossing. The entire maneuver can be completed in well under a minute, which is pretty quick, as is appropriate for a robot with two jet engines on it.
The researchers suggest that this general technique could be adapted to many more challenging situations, by helping robots control their balance when facing large obstacles that they need to step over, or even just keeping them from falling over when managing rough terrain in general. Since the jet engines allow the robot to dynamically adjust its center of mass without the need for specific ground contacts, you can imagine all kinds of crazy things, like robots that tilt themselves sideways or even do the limbo to navigate complex environments.
For more about Jet-HR1, we spoke with Zhifeng Huang, an associate professor at Guangdong University of Technology, via email.
IEEE Spectrum: How did you get the idea to put jets on the feet of a robot like this?
Zhifeng Huang: We were more or less inspired by science fiction. In fact, we considered this idea two years ago, when we noticed the mobility limitation of humanoid robots when going through rubble and debris in an earthquake aftermath scenario (e.g. the DARPA Robotics Challenge). It’s difficult for a bipedal robot to step over large obstacles, since extending the legs too much would disrupt the static balance condition, which requires the robot’s center of mass to be projected inside the support area of its foot. Some dynamic motions, such as jumping, might be considered as a solution. However, this might not be suitable for irregular terrain, as the impact of the robot when it lands might cause it to fall over.
That’s why we think a new method that enables the robot to maintain a quasi-static balance and produces a less significant impact while it steps over obstacles is necessary. And our idea was utilizing the external force of the jets to maintain the balance of the robot.
How much of a difference did the jets make to the performance of the robot?
Currently, in the quasi-static condition, the jets mainly improve the robot’s ability to keep its balance under various postures. Using the thrust of the jet, the distance that the robot’s foot can be placed extends. As shown in the demo video, even without an upper body, the robot was able to completely step over a broad gap with 45 cm in width, up to 97 percent of its leg’s length. In previous studies, only around 20 percent was possible.
What other kinds of gaits or maneuvers could benefit from jet propulsion assistance?
The jet propulsion assistance could benefit not only 2D gaits but also 3D gaits and some dynamic motions, such as jumping. It could also make some special 3D gaits possible. For example, with just thrust, the robot might be able to rotate its body while one foot is supporting itself and the other leg is swinging. In addition, the jets are helpful in reducing impacts while performing dynamic motion.
Do you think that a system like this could be a practical way for humanoid robots to move over obstacles?
Yes, current results show that the solution is entirely feasible. For a robot whose weight was lower than 15 kg, the propulsion system consists of electric ducted fans. For a humanoid robot whose weight is larger than 15 kg, turbojets might be considered. Both are mature technologies.
How could this system be improved? What are you working on next?
We are working on some practical applications of this system. Currently, one team in my laboratory has been working on the power source (e.g. high density battery) and the precision feedback control of the thrust. Another team is focusing on the robot’s locomotion planning and controller. Future studies will focus on dynamic stepping and soft-landing techniques, which may enable a robot to step over obstacles more quickly and with less impact. In addition, some new 3D gaits with the help of the jets will also be explored.






